灰度图与颜色空间
# 灰度图转换
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# HSV色彩空间转换
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
HSV 色彩空间:
- H (色调): 主波长,颜色种类
- S (饱和度): 颜色纯度/颜色的阴影
- V (亮度): 颜色的明暗程度
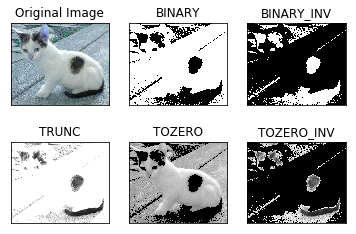
阈值处理
函数详解
cv2.threshold(src, thresh, maxval, type)
功能: 对图像进行阈值处理,将灰度图像转换为二值图像
参数:
src: 输入图像,必须是单通道灰度图像thresh: 阈值 (float)maxval: 当像素值超过阈值时赋予的新值 (float)type: 阈值类型 (int)阈值类型:
cv2.THRESH_BINARY: 二值化,src > thresh ? maxval : 0cv2.THRESH_BINARY_INV: 反二值化,src > thresh ? 0 : maxvalcv2.THRESH_TRUNC: 截断,src > thresh ? thresh : srccv2.THRESH_TOZERO: 阈值化为零,src > thresh ? src : 0cv2.THRESH_TOZERO_INV: 反阈值化为零,src > thresh ? 0 : src返回值: 元组 (retval, dst)
retval: 计算出的阈值dst: 输出图像
graph LR
A[灰度图像] --> B[阈值处理]
B --> C1[THRESH_BINARY<br>二值化]
B --> C2[THRESH_BINARY_INV<br>反二值化]
B --> C3[THRESH_TRUNC<br>截断]
B --> C4[THRESH_TOZERO<br>阈值化为零]
B --> C5[THRESH_TOZERO_INV<br>反阈值化为零]
style A fill:#FF3D71,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style B fill:#00D4FF,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C1 fill:#00C851,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C2 fill:#FF9500,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C3 fill:#9C27B0,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C4 fill:#E91E63,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C5 fill:#FF5722,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
阈值处理数学表达式:
图像平滑
函数详解
cv2.blur(src, ksize, anchor=None, borderType=None)
功能: 均值滤波,简单的图像平滑
参数:
src: 输入图像ksize: 滤波核大小 (tuple): (width, height)anchor: 锚点位置,默认为(-1, -1),表示核中心borderType: 边界处理方式
cv2.GaussianBlur(src, ksize, sigmaX, sigmaY=None, borderType=None)
功能: 高斯滤波,更自然的图像平滑
参数:
src: 输入图像ksize: 高斯核大小 (tuple): (width, height),必须为奇数sigmaX: X 方向的标准差 (float)sigmaY: Y 方向的标准差 (float),默认为 NoneborderType: 边界处理方式
cv2.medianBlur(src, ksize)
功能: 中值滤波,对椒盐噪声效果好
参数:
src: 输入图像ksize: 滤波核大小 (int),必须为奇数
cv2.boxFilter(src, ddepth, ksize, anchor=None, normalize=True, borderType=None)
功能: 方框滤波,可选择是否归一化
参数:
src: 输入图像ddepth: 输出图像深度,-1 表示与输入相同ksize: 滤波核大小 (tuple): (width, height)anchor: 锚点位置normalize: 是否归一化 (bool)borderType: 边界处理方式
graph LR
A[噪声图像] --> B[图像平滑]
B --> C1[均值滤波<br>cv2.blur]
B --> C2[方框滤波<br>cv2.boxFilter]
B --> C3[高斯滤波<br>cv2.GaussianBlur]
B --> C4[中值滤波<br>cv2.medianBlur]
style A fill:#FF3D71,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style B fill:#00D4FF,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C1 fill:#00C851,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C2 fill:#FF9500,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C3 fill:#9C27B0,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C4 fill:#E91E63,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
高斯滤波核的数学表达式:
高斯滤波器的权重随着距离中心点的增加而减小,符合正态分布,使得图像平滑效果更自然。对于一个
其中

形态学操作
函数详解
cv2.getStructuringElement(shape, ksize, anchor=None)
功能: 创建结构元素(形态学核)
参数:
shape: 结构元素形状
cv2.MORPH_RECT: 矩形cv2.MORPH_ELLIPSE: 椭圆cv2.MORPH_CROSS: 十字形ksize: 结构元素大小 (tuple): (width, height)anchor: 锚点位置,默认为(-1, -1)
cv2.erode(src, kernel, iterations=1, borderType=None, borderValue=None)
功能: 腐蚀操作
参数:
src: 输入图像,通常是二值图像kernel: 结构元素iterations: 腐蚀次数 (int)borderType: 边界处理方式borderValue: 边界值
cv2.dilate(src, kernel, iterations=1, borderType=None, borderValue=None)
功能: 膨胀操作
参数:
src: 输入图像kernel: 结构元素iterations: 膨胀次数 (int)borderType: 边界处理方式borderValue: 边界值
cv2.morphologyEx(src, op, kernel, iterations=1, borderType=None, borderValue=None)
功能: 高级形态学操作
参数:
src: 输入图像op: 形态学操作类型
cv2.MORPH_OPEN: 开运算 (先腐蚀后膨胀)cv2.MORPH_CLOSE: 闭运算 (先膨胀后腐蚀)cv2.MORPH_GRADIENT: 形态学梯度 (膨胀-腐蚀)cv2.MORPH_TOPHAT: 顶帽 (原图-开运算)cv2.MORPH_BLACKHAT: 黑帽 (闭运算-原图)kernel: 结构元素iterations: 操作次数
graph LR
A[二值图像] --> B[形态学操作]
B --> C1[腐蚀<br>cv2.erode]
B --> C2[膨胀<br>cv2.dilate]
B --> C3[开运算<br>先腐蚀后膨胀]
B --> C4[闭运算<br>先膨胀后腐蚀]
B --> C5[形态学梯度<br>膨胀-腐蚀]
B --> C6[顶帽<br>原图-开运算]
B --> C7[黑帽<br>闭运算-原图]
style A fill:#FF3D71,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style B fill:#00D4FF,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C1 fill:#00C851,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C2 fill:#FF9500,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C3 fill:#9C27B0,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C4 fill:#E91E63,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C5 fill:#FF5722,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C6 fill:#2196F3,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C7 fill:#4CAF50,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
腐蚀和膨胀的数学表达式:
腐蚀操作:
腐蚀操作通过在图像上滑动结构元素(kernel),将核内的像素值取最小值替代中心像素。直观理解是"腐蚀"掉目标的边缘,使白色区域缩小,黑色区域扩大。
膨胀操作:
膨胀操作通过在图像上滑动结构元素(kernel),将核内的像素值取最大值替代中心像素。直观理解是使目标的边缘"膨胀",白色区域扩大,黑色区域缩小。
开运算:
闭运算:
图像梯度
graph LR
A[图像] --> B[梯度检测]
B --> C1[Sobel算子<br>一阶导数]
B --> C2[Scharr算子<br>Sobel增强版]
B --> C3[Laplacian算子<br>二阶导数]
style A fill:#FF3D71,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style B fill:#00D4FF,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C1 fill:#00C851,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C2 fill:#FF9500,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C3 fill:#9C27B0,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
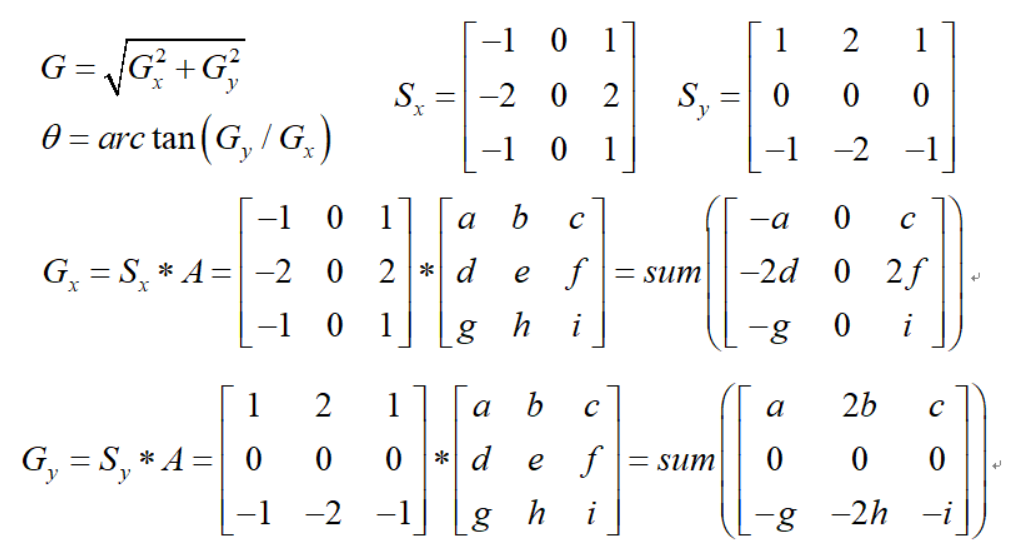
Sobel 算子的数学表达式:
X 方向 Sobel:
Y 方向 Sobel:
梯度强度:
梯度方向:
Sobel 算子通过计算图像在水平和垂直方向上的差分,近似求出图像在各点的梯度。由于它是一阶导数算子,对噪声敏感性较低,是一种常用的边缘检测算子。
Scharr 算子:
Scharr 算子是 Sobel 算子的改进版,在保持 Sobel 轻量级的同时提高了方向不变性,对于精细边缘检测效果更好。
Laplacian 算子:
Laplacian 算子是二阶导数算子,对图像进行二阶导数运算,可以同时检测出水平和垂直方向的边缘。由于是二阶导数,对噪声更为敏感。
函数详解
cv2.Sobel(src, ddepth, dx, dy, ksize=3, scale=1, delta=0, borderType=None)
功能: Sobel 算子边缘检测
参数:
src: 输入图像ddepth: 输出图像深度
cv2.CV_8U: 8 位无符号整数cv2.CV_16S: 16 位有符号整数cv2.CV_32F: 32 位浮点数cv2.CV_64F: 64 位浮点数dx: X 方向导数的阶数 (int)dy: Y 方向导数的阶数 (int)ksize: Sobel 核大小 (int),必须为 1,3,5,7scale: 缩放因子 (float)delta: 可选的偏移量 (float)borderType: 边界处理方式
cv2.Scharr(src, ddepth, dx, dy, scale=1, delta=0, borderType=None)
功能: Scharr 算子,Sobel 的改进版
参数: 与 Sobel 类似,但没有 ksize 参数(固定为 3x3)
cv2.Laplacian(src, ddepth, ksize=1, scale=1, delta=0, borderType=None)
功能: Laplacian 算子,二阶导数
参数:
src: 输入图像ddepth: 输出图像深度ksize: 核大小 (int)scale: 缩放因子delta: 偏移量borderType: 边界处理方式
cv2.convertScaleAbs(src, alpha=1, beta=0)
功能: 将图像转换为 8 位无符号整数并取绝对值
参数:
src: 输入图像alpha: 缩放系数 (float)beta: 偏移量 (float)公式: $\text{dst} = \text{saturate_cast}^{\text{uchar}}(|\text{src} \times \alpha + \beta|)$
cv2.addWeighted(src1, alpha, src2, beta, gamma, dst=None, dtype=-1)
功能: 图像加权融合
参数:
src1: 第一个输入图像alpha: 第一个图像的权重 (float)src2: 第二个输入图像beta: 第二个图像的权重 (float)gamma: 加到结果上的标量值 (float)公式: $\text{dst} = \text{src1} \times \alpha + \text{src2} \times \beta + \gamma$
# 读取图像并转为灰度图
img = cv2.imread('lena.jpg', cv2.IMREAD_GRAYSCALE)
# Sobel 算子 - 分别计算 x 和 y 方向
sobelx = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3) # x方向,ksize是核大小
sobely = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=3) # y方向
# 取绝对值并转换为 uint8 类型
sobelx = cv2.convertScaleAbs(sobelx)
sobely = cv2.convertScaleAbs(sobely)
# 合并 x 和 y 方向的梯度
sobelxy = cv2.addWeighted(sobelx, 0.5, sobely, 0.5, 0)
# Scharr 算子 - 比 Sobel 更精确
scharrx = cv2.Scharr(img, cv2.CV_64F, 1, 0)
scharry = cv2.Scharr(img, cv2.CV_64F, 0, 1)
scharrx = cv2.convertScaleAbs(scharrx)
scharry = cv2.convertScaleAbs(scharry)
scharrxy = cv2.addWeighted(scharrx, 0.5, scharry, 0.5, 0)
# Laplacian 算子 - 二阶导数
laplacian = cv2.Laplacian(img, cv2.CV_64F)
laplacian = cv2.convertScaleAbs(laplacian)

Canny 边缘检测
graph LR
A[图像] --> B[高斯滤波<br>去噪]
B --> C[计算梯度强度和方向]
C --> D[非极大值抑制]
D --> E[双阈值检测]
E --> F[边缘连接]
style A fill:#FF3D71,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style B fill:#00D4FF,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C fill:#00C851,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style D fill:#FF9500,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style E fill:#9C27B0,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style F fill:#E91E63,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
Canny 边缘检测步骤:
高斯滤波: 使用高斯滤波器平滑图像,去除噪声
- 滤波器的大小由
确定,一般 ,滤波核大小为
- 滤波器的大小由
计算梯度: 使用 Sobel 算子计算每个像素点的梯度强度和方向
- 梯度强度:
- 梯度方向:
- 梯度方向一般被量化为 4 个主方向:0°, 45°, 90°, 135°
- 梯度强度:
非极大值抑制(NMS): 沿梯度方向,如果像素梯度值不是局部最大值,则将其抑制为零
- 保留"山脊"上的像素,抑制其他像素,使边缘变细
双阈值检测: 使用两个阈值
和 对图像进行二值化 - 强边缘:
,直接保留 - 弱边缘:
,需要进一步判断 - 非边缘:
,直接丢弃
- 强边缘:
边缘连接: 对弱边缘像素进行判断,如果与强边缘像素相连,则保留,否则丢弃
- 常使用 8 邻域连通性判断
- 最终得到的边缘是由强边缘点连成的单像素宽的曲线
Canny 边缘检测算法可以通过调整
函数详解
cv2.Canny(image, threshold1, threshold2, edges=None, apertureSize=3, L2gradient=False)
功能: Canny 边缘检测算法
参数:
image: 输入图像,必须是 8 位灰度图像threshold1: 第一个阈值(低阈值)(float)threshold2: 第二个阈值(高阈值)(float)edges: 输出边缘图像(可选)apertureSize: Sobel 算子孔径大小 (int),必须为 3,5,7L2gradient: 是否使用 L2 范数计算梯度幅值 (bool)
- True:
- False:
返回值: 边缘检测结果图像
# Canny 边缘检测示例
img = cv2.imread('lena.jpg', cv2.IMREAD_GRAYSCALE)
# 使用不同的阈值进行 Canny 边缘检测
edges1 = cv2.Canny(img, 50, 150) # 低阈值 = 50, 高阈值 = 150
edges2 = cv2.Canny(img, 100, 200) # 低阈值 = 100, 高阈值 = 200
edges3 = cv2.Canny(img, 150, 250) # 低阈值 = 150, 高阈值 = 250
# 步骤分解 (用于教学目的)
# 1. 高斯滤波
blurred = cv2.GaussianBlur(img, (5, 5), 1.4)
# 2. 梯度计算
sobelx = cv2.Sobel(blurred, cv2.CV_64F, 1, 0, ksize=3)
sobely = cv2.Sobel(blurred, cv2.CV_64F, 0, 1, ksize=3)
magnitude = np.sqrt(sobelx**2 + sobely**2).astype(np.uint8)
# 3-5. 非极大值抑制、双阈值检测和边缘连接由 cv2.Canny 内部完成
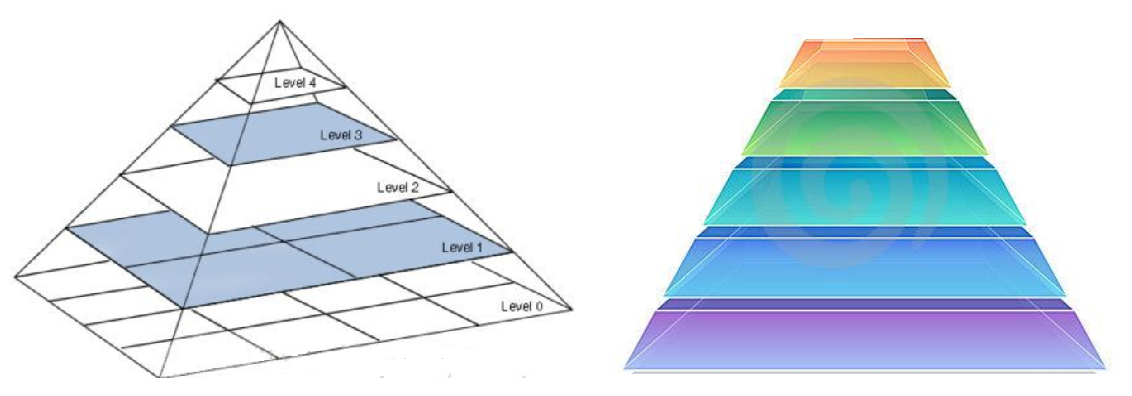
图像金字塔
graph LR
A[原始图像] --> B[图像金字塔]
B --> C1[高斯金字塔<br>图像采样]
B --> C2[拉普拉斯金字塔<br>残差图像]
C1 --> D1[向下采样<br>pyrDown]
C1 --> D2[向上采样<br>pyrUp]
style A fill:#FF3D71,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style B fill:#00D4FF,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C1 fill:#00C851,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C2 fill:#FF9500,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style D1 fill:#9C27B0,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style D2 fill:#E91E63,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
拉普拉斯金字塔的数学表达式:
其中:
是第 层高斯金字塔图像 是将第 层高斯金字塔图像上采样到第 层大小
高斯金字塔的构建过程:
- 原始图像
作为第 0 层 - 对
进行高斯滤波并下采样(隔点采样)得到 ,尺寸变为原来的 1/4 - 重复步骤 2,得到更高层的金字塔
在 OpenCV 中,通过 cv2.pyrDown() 实现高斯金字塔的向下采样,它结合了高斯滤波和下采样两个操作:
拉普拉斯金字塔的构建过程:
- 计算高斯金字塔
- 对于每一层(除了最顶层),计算
拉普拉斯金字塔常用于图像融合、图像压缩等任务,它保存了不同分辨率下的图像细节信息。
函数详解
cv2.pyrDown(src, dstsize=None, borderType=None)
功能: 向下采样,图像尺寸减半
参数:
src: 输入图像dstsize: 输出图像尺寸 (tuple),默认为 None(自动计算)borderType: 边界处理方式返回值: 下采样后的图像
cv2.pyrUp(src, dstsize=None, borderType=None)
功能: 向上采样,图像尺寸加倍
参数:
src: 输入图像dstsize: 输出图像尺寸 (tuple),默认为 None(自动计算)borderType: 边界处理方式返回值: 上采样后的图像
cv2.resize(src, dsize, fx=0, fy=0, interpolation=cv2.INTER_LINEAR)
功能: 调整图像大小
参数:
src: 输入图像dsize: 输出图像尺寸 (tuple): (width, height)fx: 水平缩放因子 (float)fy: 垂直缩放因子 (float)interpolation: 插值方法
cv2.INTER_LINEAR: 双线性插值(默认)cv2.INTER_NEAREST: 最近邻插值cv2.INTER_CUBIC: 双三次插值
# 图像金字塔示例
img = cv2.imread('lena.jpg')
# 构建高斯金字塔
G0 = img.copy() # 原始图像
G1 = cv2.pyrDown(G0) # 第一层
G2 = cv2.pyrDown(G1) # 第二层
G3 = cv2.pyrDown(G2) # 第三层
# 构建拉普拉斯金字塔
# 注意:pyrUp 需要调整尺寸以匹配上一层
L0 = G0 - cv2.resize(cv2.pyrUp(G1), (G0.shape[1], G0.shape[0]))
L1 = G1 - cv2.resize(cv2.pyrUp(G2), (G1.shape[1], G1.shape[0]))
L2 = G2 - cv2.resize(cv2.pyrUp(G3), (G2.shape[1], G2.shape[0]))
# 将拉普拉斯金字塔转换为可视化图像(加上 127 使结果在 0-255 范围内)
L0_vis = cv2.convertScaleAbs(L0, alpha=1, beta=127)
L1_vis = cv2.convertScaleAbs(L1, alpha=1, beta=127)
L2_vis = cv2.convertScaleAbs(L2, alpha=1, beta=127)
图像轮廓
graph LR
A[二值图像] --> B[轮廓检测<br>cv2.findContours]
B --> C[轮廓绘制<br>cv2.drawContours]
C --> D1[轮廓面积<br>cv2.contourArea]
C --> D2[轮廓周长<br>cv2.arcLength]
C --> D3[轮廓近似<br>cv2.approxPolyDP]
style A fill:#FF3D71,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style B fill:#00D4FF,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C fill:#00C851,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style D1 fill:#FF9500,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style D2 fill:#9C27B0,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style D3 fill:#E91E63,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
轮廓检索模式:
- RETR_EXTERNAL: 只检索最外面的轮廓,忽略内部轮廓
- RETR_LIST: 检索所有轮廓,并以列表形式返回,不建立层次关系
- RETR_CCOMP: 检索所有轮廓,组织为两层层次结构
- 顶层是各部分的外部边界
- 第二层是内部孔洞的边界
- RETR_TREE: 检索所有轮廓,并重构嵌套轮廓的完整层次结构
轮廓逼近方法:
- CHAIN_APPROX_NONE: 存储轮廓上的所有点
- CHAIN_APPROX_SIMPLE: 压缩水平、垂直和对角线部分,只保留端点
- 例如,一个矩形轮廓只需要 4 个点,而不是沿着边界的所有点
轮廓分析常用功能:
- 轮廓面积:
cv2.contourArea(contour)- 计算轮廓内部的面积 - 轮廓周长:
cv2.arcLength(contour, closed)- 计算轮廓的周长 - 轮廓近似:
cv2.approxPolyDP(contour, epsilon, closed)- 多边形近似 - 凸包检测:
cv2.convexHull(contour)- 计算点集的凸包 - 边界矩形:
- 直矩形:
cv2.boundingRect(contour)- 不考虑旋转的矩形 - 最小矩形:
cv2.minAreaRect(contour)- 考虑旋转的最小面积矩形
- 直矩形:
- 最小外接圆:
cv2.minEnclosingCircle(contour)- 能包含轮廓的最小圆
函数详解
cv2.findContours(image, mode, method, contours=None, hierarchy=None, offset=None)
功能: 查找图像中的轮廓
参数:
image: 输入图像,必须是 8 位单通道二值图像mode: 轮廓检索模式
cv2.RETR_EXTERNAL: 只检索最外层轮廓cv2.RETR_LIST: 检索所有轮廓,不建立层次关系cv2.RETR_CCOMP: 检索所有轮廓,组织为两层层次结构cv2.RETR_TREE: 检索所有轮廓,建立完整层次结构method: 轮廓近似方法
cv2.CHAIN_APPROX_NONE: 存储所有轮廓点cv2.CHAIN_APPROX_SIMPLE: 压缩水平、垂直和对角线段,只保留端点contours: 输出的轮廓列表(可选)hierarchy: 输出的层次结构(可选)offset: 轮廓点偏移量(可选)返回值: 元组 (contours, hierarchy)
contours: 轮廓列表,每个轮廓是一个点的数组hierarchy: 层次结构信息
cv2.drawContours(image, contours, contourIdx, color, thickness=None, lineType=None, hierarchy=None, maxLevel=None, offset=None)
功能: 绘制轮廓
参数:
image: 输出图像contours: 轮廓列表contourIdx: 要绘制的轮廓索引,-1 表示绘制所有轮廓color: 轮廓颜色 (tuple): (B, G, R)thickness: 轮廓线宽度,-1 表示填充lineType: 线条类型hierarchy: 层次结构maxLevel: 绘制层次的最大级别offset: 偏移量
cv2.contourArea(contour, oriented=False)
功能: 计算轮廓面积
参数:
contour: 轮廓点数组oriented: 是否考虑方向 (bool)返回值: 轮廓面积 (float)
cv2.arcLength(curve, closed)
功能: 计算轮廓周长
参数:
curve: 轮廓点数组closed: 轮廓是否封闭 (bool)返回值: 轮廓周长 (float)
cv2.approxPolyDP(curve, epsilon, closed)
功能: 轮廓近似为多边形
参数:
curve: 轮廓点数组epsilon: 近似精度,原始轮廓到近似轮廓的最大距离closed: 轮廓是否封闭 (bool)返回值: 近似后的轮廓点数组
# 轮廓检测示例
# 首先需要二值图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# 查找轮廓
contours, hierarchy = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 绘制轮廓
cv2.drawContours(img, contours, -1, (0, 255, 0), 2) # 绿色轮廓,线宽2
# 计算轮廓属性
for i, contour in enumerate(contours):
area = cv2.contourArea(contour)
perimeter = cv2.arcLength(contour, True)
print(f"轮廓{i}: 面积={area:.2f}, 周长={perimeter:.2f}")
# 轮廓近似
epsilon = 0.02 * perimeter
approx = cv2.approxPolyDP(contour, epsilon, True)
print(f"近似后顶点数: {len(approx)}")