核心原理
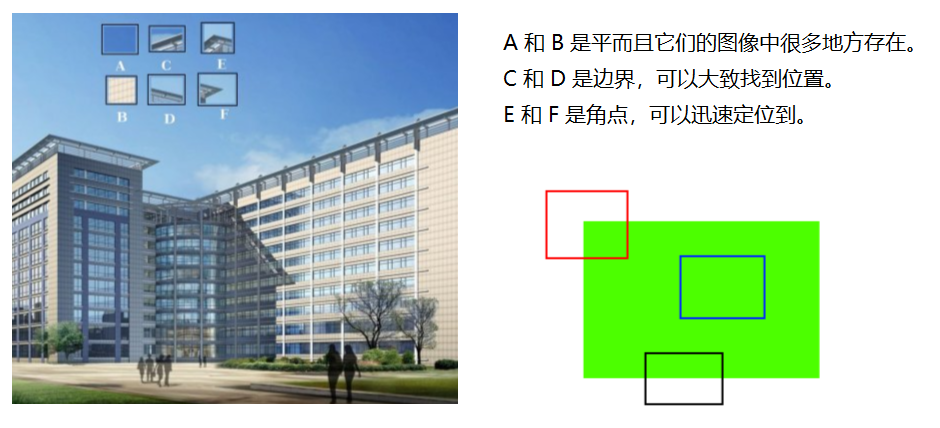
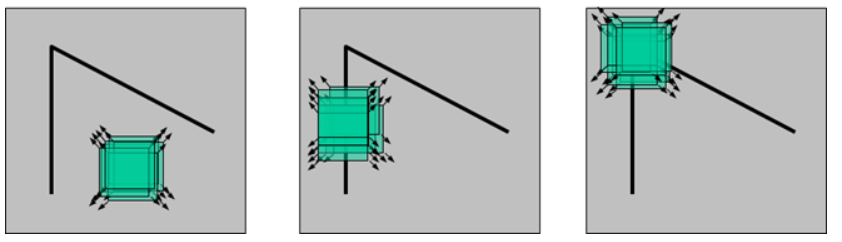
Harris 角点检测基于图像的局部自相关函数,通过分析像素点周围的梯度变化来识别角点。角点具有以下特性:
- 在多个方向上都有较大的梯度变化
- 是图像中的稳定特征点
- 对噪声具有一定的鲁棒性
数学公式
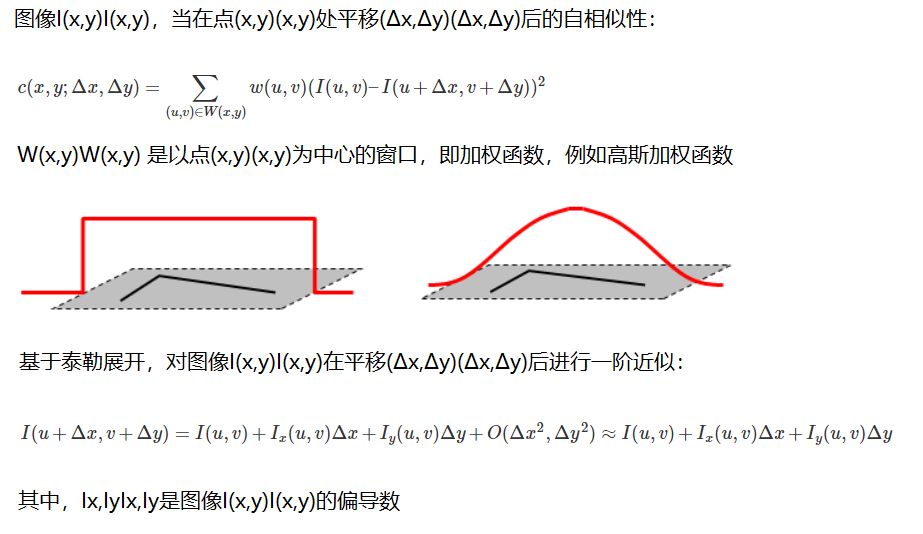
自相关函数
其中:
是窗口函数(通常为高斯函数) 是图像强度函数 是位移量
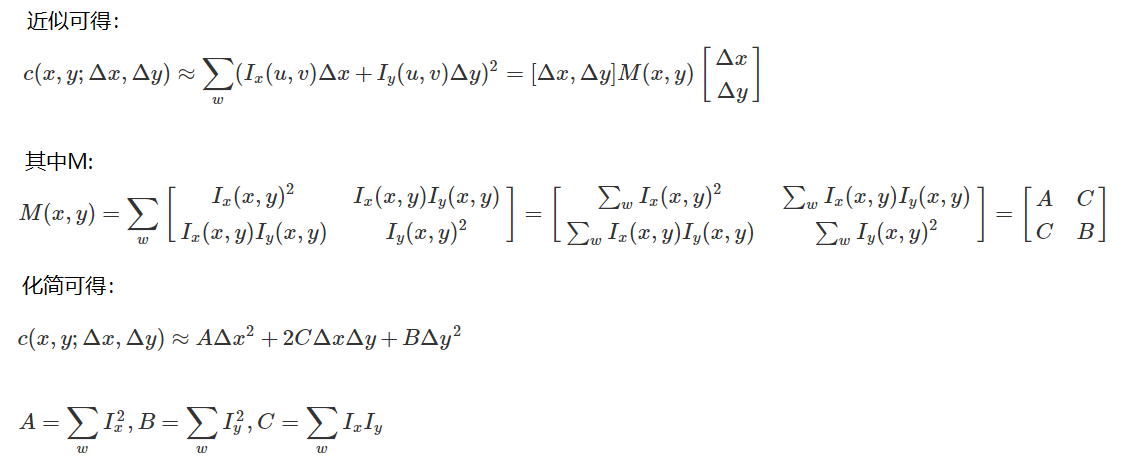
Harris 矩阵(结构张量)
其中:
, 是图像梯度
Harris 响应函数
其中:
是 Harris 参数 是矩阵 的特征值
角点判定条件
:角点 :边缘 :平坦区域
流程图
graph LR
A[输入图像] --> B[转换为灰度图]
B --> C[计算图像梯度]
C --> D[构建Harris矩阵]
D --> E[计算响应函数R]
E --> F[阈值化处理]
F --> G[非极大值抑制]
G --> H[标记角点]
style A fill:#FF3D71,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style B fill:#00D4FF,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C fill:#00C851,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style D fill:#FF9500,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style E fill:#9C27B0,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style F fill:#E91E63,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style G fill:#FF5722,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style H fill:#4CAF50,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
OpenCV 实现
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 基本Harris角点检测
def harris_corner_detection(image_path):
"""Harris角点检测基本实现"""
# 读取图像
img = cv2.imread(image_path)
if img is None:
print(f"无法读取图像: {image_path}")
return None
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Harris角点检测
dst = cv2.cornerHarris(gray, blockSize=2, ksize=3, k=0.04)
# 标记角点
img[dst > 0.01 * dst.max()] = [0, 0, 255] # 红色标记
return img
# 使用示例 img_path = '/images/notes/opencv/test_1.jpg'
result = harris_corner_detection(img_path)
if result is not None:
cv2.imshow('Harris Corners', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
函数详解
cv2.cornerHarris(src, blockSize, ksize, k, dst=None, borderType=cv2.BORDER_DEFAULT)
功能: 执行 Harris 角点检测
参数:
src: 输入的灰度图像 (numpy.ndarray)blockSize: 角点检测窗口大小 (int)
- 取值范围:通常为 2-7
- 较小值:检测更多细节,但可能包含噪声
- 较大值:检测更稳定的角点
ksize: Sobel 算子窗口大小 (int)
- 取值范围:1, 3, 5, 7
- 必须为奇数
- 影响梯度计算的精度
k: Harris 响应函数参数 (float)
- 取值范围:0.04-0.06
- 影响角点检测的灵敏度
dst: 输出图像 (可选)borderType: 边界类型 (int, 可选)返回值: Harris 响应图像 (numpy.ndarray),数据类型为 float32
注意: 返回的是响应值图像,需要进一步处理才能获得角点坐标
cv2.goodFeaturesToTrack(image, maxCorners, qualityLevel, minDistance, corners=None, mask=None, blockSize=3, useHarrisDetector=False, k=0.04)
功能: 检测图像中的强角点,可以使用 Harris 检测器
参数:
image: 输入的灰度图像 (numpy.ndarray)maxCorners: 返回的最大角点数 (int)qualityLevel: 角点质量水平 (float)
- 取值范围:0-1
- 相对于最强角点的质量比例
minDistance: 角点之间的最小欧氏距离 (float)corners: 输出角点数组 (可选)mask: 感兴趣区域掩码 (可选)blockSize: 角点检测窗口大小 (int, 默认 3)useHarrisDetector: 是否使用 Harris 检测器 (bool, 默认 False)k: Harris 检测器参数 (float, 默认 0.04)返回值: 角点坐标数组 (numpy.ndarray),形状为(N, 1, 2)
参数调优与示例
不同参数组合比较
def harris_parameter_comparison(image_path):
"""Harris角点检测参数比较"""
img = cv2.imread(image_path)
if img is None:
print(f"无法读取图像: {image_path}")
return
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 不同参数组合的测试
parameters = [
{'blockSize': 2, 'ksize': 3, 'k': 0.04, 'title': 'blockSize=2, k=0.04'},
{'blockSize': 3, 'ksize': 3, 'k': 0.05, 'title': 'blockSize=3, k=0.05'},
{'blockSize': 5, 'ksize': 5, 'k': 0.06, 'title': 'blockSize=5, k=0.06'},
]
plt.figure(figsize=(15, 5))
for i, params in enumerate(parameters):
# Harris角点检测
dst = cv2.cornerHarris(gray,
blockSize=params['blockSize'],
ksize=params['ksize'],
k=params['k'])
# 创建结果图像
img_copy = img.copy()
img_copy[dst > 0.01 * dst.max()] = [0, 0, 255]
# 显示结果
plt.subplot(1, 3, i+1)
plt.imshow(cv2.cvtColor(img_copy, cv2.COLOR_BGR2RGB))
plt.title(params['title'])
plt.axis('off')
plt.tight_layout()
plt.show()
# 使用示例
harris_parameter_comparison('/images/notes/opencv/test_1.jpg')
改进的 Harris 角点检测
def enhanced_harris_detection(image_path, threshold_ratio=0.01):
"""增强版Harris角点检测"""
img = cv2.imread(image_path)
if img is None:
print(f"无法读取图像: {image_path}")
return None
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# Harris角点检测
dst = cv2.cornerHarris(gray, 2, 3, 0.04)
# 膨胀操作,增强角点
dst = cv2.dilate(dst, None)
# 找到角点位置
corners = np.where(dst > threshold_ratio * dst.max())
# 绘制角点
result = img.copy()
for y, x in zip(corners[0], corners[1]):
cv2.circle(result, (x, y), 3, (0, 255, 0), -1)
return result, len(corners[0])
# 使用示例
result, corner_count = enhanced_harris_detection('/images/notes/opencv/test_1.jpg')
if result is not None:
print(f"检测到 {corner_count} 个角点")
cv2.imshow('Enhanced Harris Corners', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
优缺点分析
优点
- 计算效率高:相比其他特征检测算法,Harris 检测速度快
- 对噪声鲁棒:对一定程度的噪声具有抵抗能力
- 理论基础扎实:基于图像梯度的数学原理清晰
- 实现简单:算法逻辑简单,易于理解和实现
缺点
- 尺度敏感:对图像缩放敏感,缺乏尺度不变性
- 旋转敏感:对图像旋转敏感,缺乏旋转不变性
- 只检测角点:只能检测角点,无法检测其他类型的特征
- 无特征描述:只提供角点位置,不提供特征描述符
应用场景
适用场景
- 简单几何图形检测:矩形、三角形等几何形状的角点
- 建筑物检测:建筑物的角点和边缘
- 实时应用:对速度要求高的场景
- 预处理步骤:作为其他算法的预处理步骤
不适用场景
- 复杂纹理匹配:需要更复杂的特征描述
- 尺度变化大:图像存在显著尺度变化
- 旋转变化大:图像存在显著旋转变化
- 光照变化大:光照条件变化剧烈
实际应用示例
棋盘格角点检测
def detect_chessboard_corners(image_path):
"""棋盘格角点检测"""
img = cv2.imread(image_path)
if img is None:
print(f"无法读取图像: {image_path}")
return None
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 方法1:使用Harris角点检测
dst = cv2.cornerHarris(gray, 2, 3, 0.04)
# 方法2:使用goodFeaturesToTrack结合Harris检测器
corners = cv2.goodFeaturesToTrack(gray,
maxCorners=100,
qualityLevel=0.01,
minDistance=10,
useHarrisDetector=True,
k=0.04)
# 绘制角点
result = img.copy()
if corners is not None:
for corner in corners:
x, y = corner.ravel().astype(int)
cv2.circle(result, (x, y), 3, (0, 255, 0), -1)
return result
# 使用示例
result = detect_chessboard_corners('/images/notes/opencv/chessboard.jpg')
if result is not None:
cv2.imshow('Chessboard Corners', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
建筑物角点检测
def detect_building_corners(image_path):
"""建筑物角点检测"""
img = cv2.imread(image_path)
if img is None:
print(f"无法读取图像: {image_path}")
return None
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 预处理:增强对比度
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
enhanced = clahe.apply(gray)
# Harris角点检测
dst = cv2.cornerHarris(enhanced, 3, 3, 0.04)
# 阈值化和非极大值抑制
threshold = 0.01 * dst.max()
corners = np.where(dst > threshold)
# 绘制角点
result = img.copy()
for y, x in zip(corners[0], corners[1]):
cv2.circle(result, (x, y), 5, (0, 0, 255), -1)
return result
# 使用示例
result = detect_building_corners('/images/notes/opencv/building.jpg')
if result is not None:
cv2.imshow('Building Corners', result)
cv2.waitKey(0)
cv2.destroyAllWindows()
实用技巧与最佳实践
角点检测优化技巧
def optimized_harris_detection(image_path, **kwargs):
"""优化的Harris角点检测"""
# 默认参数
params = {
'blockSize': 2,
'ksize': 3,
'k': 0.04,
'threshold_ratio': 0.01,
'use_clahe': True,
'dilate_kernel': None
}
params.update(kwargs)
img = cv2.imread(image_path)
if img is None:
print(f"无法读取图像: {image_path}")
return None
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 可选的对比度增强
if params['use_clahe']:
clahe = cv2.createCLAHE(clipLimit=2.0, tileGridSize=(8, 8))
gray = clahe.apply(gray)
# Harris角点检测
dst = cv2.cornerHarris(gray,
params['blockSize'],
params['ksize'],
params['k'])
# 可选的膨胀操作
if params['dilate_kernel'] is not None:
dst = cv2.dilate(dst, params['dilate_kernel'])
# 阈值化处理
threshold = params['threshold_ratio'] * dst.max()
corners = np.where(dst > threshold)
# 创建结果图像
result = img.copy()
for y, x in zip(corners[0], corners[1]):
cv2.circle(result, (x, y), 3, (0, 255, 0), -1)
return result, len(corners[0])
# 使用示例
result, count = optimized_harris_detection('/images/notes/opencv/test_1.jpg',
threshold_ratio=0.02,
use_clahe=True)
if result is not None:
print(f"检测到 {count} 个角点")