核心概念
背景建模是从视频序列中分离前景目标和背景的关键技术,广泛应用于视频监控、目标跟踪和运动分析。
流程图
graph LR
A[视频输入] --> B{选择算法}
B --> C[帧差法]
B --> D[混合高斯模型]
C --> E[像素差分]
E --> F[阈值判断]
F --> G[前景掩码]
D --> H[高斯模型训练]
H --> I[参数更新]
I --> J[GMM匹配]
J --> K[前景检测]
G --> L[轮廓检测]
K --> L
L --> M[目标框定]
style A fill:#FF3D71,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style B fill:#00D4FF,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C fill:#00C851,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style D fill:#FF9500,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style E fill:#9C27B0,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style F fill:#E91E63,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style G fill:#FF5722,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style H fill:#4CAF50,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style I fill:#2196F3,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style J fill:#FF6F00,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style K fill:#8BC34A,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style L fill:#3F51B5,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style M fill:#009688,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
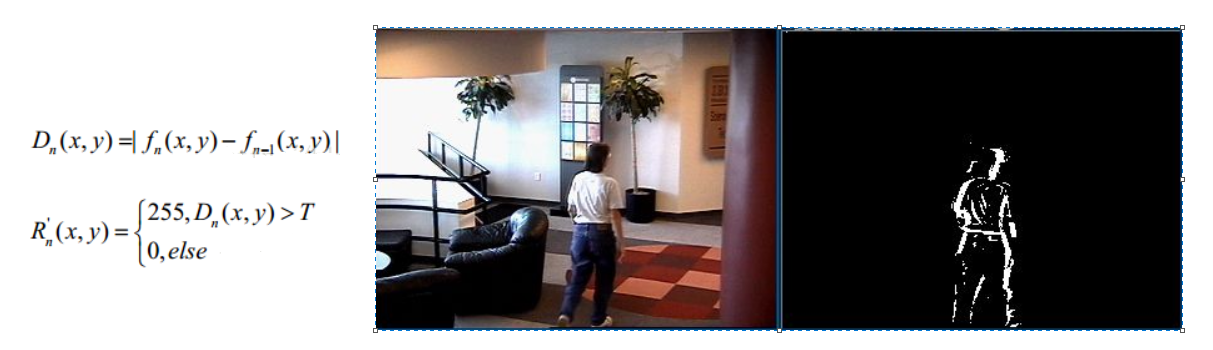
帧差法 (Frame Differencing)
数学原理
对连续两帧图像进行差分运算:
其中:
为当前帧像素值 为前一帧像素值 - 判断条件:
(阈值)
算法步骤
- 图像预处理: 灰度化、去噪
- 帧差计算:
- 二值化:
- 形态学处理: 去除噪声和填充空洞
优缺点
优点:
- 计算简单,实时性好,内存占用小
- 对快速运动物体检测效果好
- 实现简单,易于理解
缺点:
- 产生噪声和空洞,对光照变化敏感
- 无法处理静止目标
- 容易受到摄像头抖动影响
混合高斯模型 (Gaussian Mixture Model)
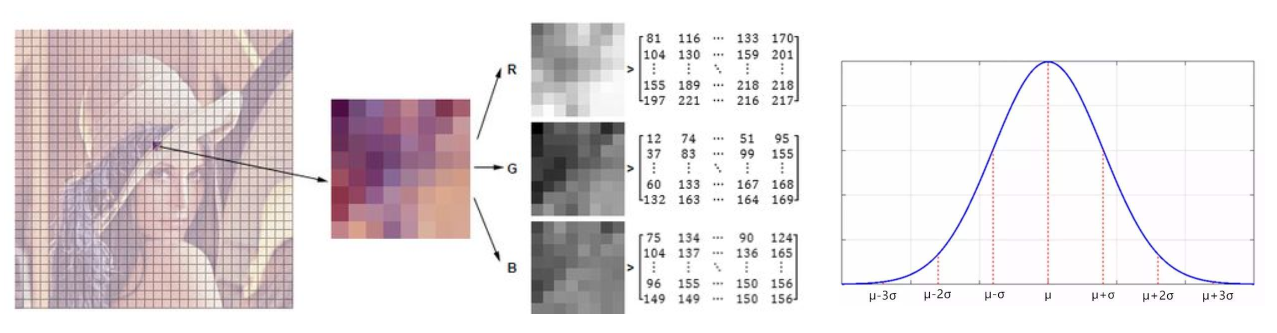
数学原理
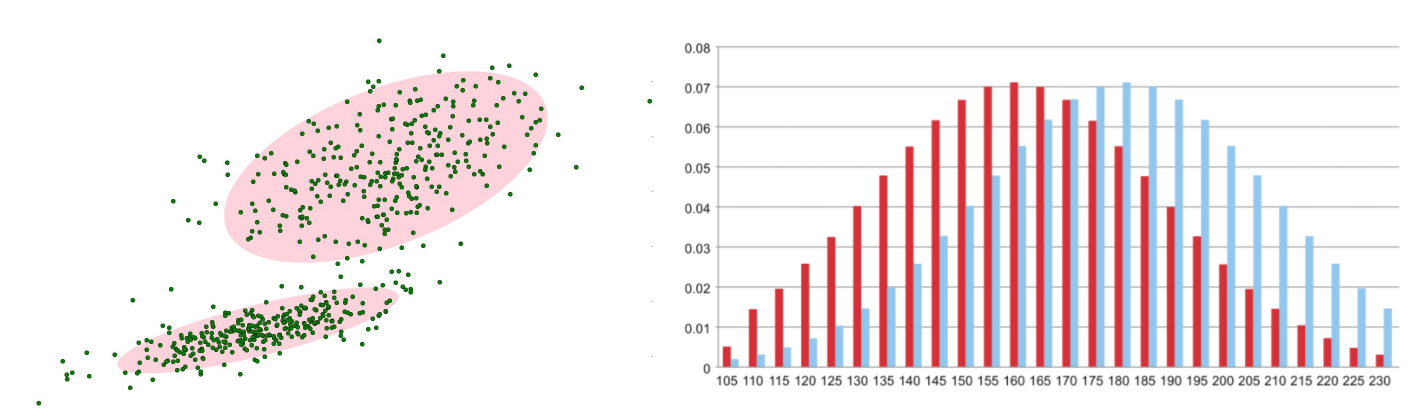
每个像素点的背景分布建模为 K 个高斯分布的混合:
其中:
是第 k 个高斯分量的权重,满足 是均值向量 是协方差矩阵 是多元高斯分布函数
高斯分布函数定义为:
参数更新公式
对于匹配的高斯分量,参数更新为:
其中:
为学习率 (通常取 0.005-0.01) 为匹配指示变量
前景检测判断
像素点与模型匹配条件:
其中

函数详解
cv2.createBackgroundSubtractorMOG2(history=500, varThreshold=16, detectShadows=True)
功能: 创建基于混合高斯模型的背景减除器
参数:
history: 用于建立背景模型的历史帧数 (int)
- 取值范围:通常为 200-500
- 较大值:背景模型更稳定,但适应性较差
- 较小值:背景模型适应性好,但可能不够稳定
varThreshold: 马氏距离阈值 (float)
- 取值范围:通常为 16-50
- 较大值:检测到更多前景,但噪声也增加
- 较小值:检测结果更准确,但可能遗漏前景
detectShadows: 是否检测阴影 (bool)
- True: 检测阴影并标记为灰色值 (127)
- False: 不检测阴影
返回值: BackgroundSubtractorMOG2 对象
cv2.createBackgroundSubtractorKNN(history=500, dist2Threshold=400, detectShadows=True)
功能: 创建基于 K-最近邻的背景减除器
参数:
history: 用于建立背景模型的历史帧数 (int)dist2Threshold: K-最近邻距离阈值 (float)
- 取值范围:通常为 300-500
- 影响前景检测的敏感度
detectShadows: 是否检测阴影 (bool)返回值: BackgroundSubtractorKNN 对象
backgroundSubtractor.apply(image, learningRate=-1)
功能: 对输入图像应用背景减除
参数:
image: 输入图像 (numpy.ndarray)learningRate: 学习率 (float)
- -1: 使用默认学习率 (1/history)
- 0: 不更新背景模型
- 0-1: 自定义学习率
返回值: 前景掩码 (numpy.ndarray),前景为 255,背景为 0
backgroundSubtractor.getBackgroundImage()
功能: 获取当前背景模型图像
参数: 无
返回值: 背景图像 (numpy.ndarray)
基础实现
import cv2
import numpy as np
def basic_background_subtraction(video_path):
"""基础背景减除实现"""
# 读取视频
cap = cv2.VideoCapture(video_path)
if not cap.isOpened():
print(f"无法打开视频: {video_path}")
return None
# 创建背景减除器
bg_subtractor = cv2.createBackgroundSubtractorMOG2(
history=500,
varThreshold=16,
detectShadows=True
)
while True:
ret, frame = cap.read()
if not ret:
break
# 应用背景减除
fg_mask = bg_subtractor.apply(frame)
# 获取背景图像
bg_image = bg_subtractor.getBackgroundImage()
# 显示结果
cv2.imshow('Original', frame)
cv2.imshow('Foreground Mask', fg_mask)
if bg_image is not None:
cv2.imshow('Background Model', bg_image)
# 按 'q' 键退出
if cv2.waitKey(30) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
# 使用示例
basic_background_subtraction('videos/traffic.mp4')
帧差法实现
def frame_differencing(video_path, threshold=30):
"""帧差法背景减除"""
cap = cv2.VideoCapture(video_path)
if not cap.isOpened():
print(f"无法打开视频: {video_path}")
return None
# 读取第一帧
ret, prev_frame = cap.read()
if not ret:
print("无法读取视频帧")
return None
prev_gray = cv2.cvtColor(prev_frame, cv2.COLOR_BGR2GRAY)
while True:
ret, curr_frame = cap.read()
if not ret:
break
# 转换为灰度图
curr_gray = cv2.cvtColor(curr_frame, cv2.COLOR_BGR2GRAY)
# 计算帧差
diff = cv2.absdiff(prev_gray, curr_gray)
# 阈值化
_, binary = cv2.threshold(diff, threshold, 255, cv2.THRESH_BINARY)
# 形态学操作去噪
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (3, 3))
binary = cv2.morphologyEx(binary, cv2.MORPH_OPEN, kernel)
binary = cv2.morphologyEx(binary, cv2.MORPH_CLOSE, kernel)
# 显示结果
cv2.imshow('Original', curr_frame)
cv2.imshow('Frame Difference', diff)
cv2.imshow('Binary Mask', binary)
# 更新前一帧
prev_gray = curr_gray.copy()
if cv2.waitKey(30) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
# 使用示例
frame_differencing('videos/traffic.mp4', threshold=25)
参数优化示例
def optimized_background_subtraction(video_path):
"""优化的背景减除"""
cap = cv2.VideoCapture(video_path)
if not cap.isOpened():
print(f"无法打开视频: {video_path}")
return None
# 创建多个背景减除器进行比较
bg_mog2 = cv2.createBackgroundSubtractorMOG2(
history=500,
varThreshold=16,
detectShadows=True
)
bg_knn = cv2.createBackgroundSubtractorKNN(
history=500,
dist2Threshold=400,
detectShadows=True
)
while True:
ret, frame = cap.read()
if not ret:
break
# 应用不同的背景减除器
fg_mog2 = bg_mog2.apply(frame)
fg_knn = bg_knn.apply(frame)
# 形态学操作优化结果
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))
# 对MOG2结果进行优化
fg_mog2_clean = cv2.morphologyEx(fg_mog2, cv2.MORPH_OPEN, kernel)
fg_mog2_clean = cv2.morphologyEx(fg_mog2_clean, cv2.MORPH_CLOSE, kernel)
# 对KNN结果进行优化
fg_knn_clean = cv2.morphologyEx(fg_knn, cv2.MORPH_OPEN, kernel)
fg_knn_clean = cv2.morphologyEx(fg_knn_clean, cv2.MORPH_CLOSE, kernel)
# 显示结果
cv2.imshow('Original', frame)
cv2.imshow('MOG2 Raw', fg_mog2)
cv2.imshow('MOG2 Clean', fg_mog2_clean)
cv2.imshow('KNN Raw', fg_knn)
cv2.imshow('KNN Clean', fg_knn_clean)
if cv2.waitKey(30) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
# 使用示例
optimized_background_subtraction('videos/traffic.mp4')
算法比较
不同算法特点对比
| 算法 | 计算复杂度 | 内存占用 | 适应性 | 鲁棒性 | 适用场景 |
|---|---|---|---|---|---|
| 帧差法 | 低 | 低 | 差 | 差 | 简单场景,实时性要求高 |
| 混合高斯模型 | 中 | 中 | 好 | 好 | 复杂场景,光照变化 |
| KNN | 高 | 高 | 很好 | 很好 | 复杂场景,高精度要求 |
应用场景
视频监控
def video_surveillance(video_path):
"""视频监控应用"""
cap = cv2.VideoCapture(video_path)
if not cap.isOpened():
return None
# 创建背景减除器
bg_subtractor = cv2.createBackgroundSubtractorMOG2(
history=500,
varThreshold=25,
detectShadows=True
)
# 设置最小轮廓面积
min_area = 500
while True:
ret, frame = cap.read()
if not ret:
break
# 背景减除
fg_mask = bg_subtractor.apply(frame)
# 形态学操作
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))
fg_mask = cv2.morphologyEx(fg_mask, cv2.MORPH_OPEN, kernel)
fg_mask = cv2.morphologyEx(fg_mask, cv2.MORPH_CLOSE, kernel)
# 查找轮廓
contours, _ = cv2.findContours(fg_mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 绘制边界框
for contour in contours:
area = cv2.contourArea(contour)
if area > min_area:
x, y, w, h = cv2.boundingRect(contour)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.putText(frame, f'Area: {int(area)}', (x, y - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 1)
# 显示结果
cv2.imshow('Surveillance', frame)
cv2.imshow('Foreground Mask', fg_mask)
if cv2.waitKey(30) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
# 使用示例
video_surveillance('videos/surveillance.mp4')
交通流量统计
def traffic_counting(video_path):
"""交通流量统计"""
cap = cv2.VideoCapture(video_path)
if not cap.isOpened():
return None
# 创建背景减除器
bg_subtractor = cv2.createBackgroundSubtractorMOG2(
history=500,
varThreshold=20,
detectShadows=True
)
# 设置计数线
line_y = 300 # 计数线的y坐标
vehicle_count = 0
tracked_objects = {}
next_id = 0
while True:
ret, frame = cap.read()
if not ret:
break
# 背景减除
fg_mask = bg_subtractor.apply(frame)
# 形态学操作
kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (7, 7))
fg_mask = cv2.morphologyEx(fg_mask, cv2.MORPH_OPEN, kernel)
fg_mask = cv2.morphologyEx(fg_mask, cv2.MORPH_CLOSE, kernel)
# 查找轮廓
contours, _ = cv2.findContours(fg_mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 绘制计数线
cv2.line(frame, (0, line_y), (frame.shape[1], line_y), (255, 0, 0), 2)
# 检测车辆
for contour in contours:
area = cv2.contourArea(contour)
if area > 1000: # 最小车辆面积
x, y, w, h = cv2.boundingRect(contour)
center_y = y + h // 2
# 检查是否穿过计数线
if abs(center_y - line_y) < 5: # 允许一定的误差
vehicle_count += 1
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
# 显示计数
cv2.putText(frame, f'Vehicle Count: {vehicle_count}', (10, 30),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 255), 2)
# 显示结果
cv2.imshow('Traffic Counting', frame)
cv2.imshow('Foreground Mask', fg_mask)
if cv2.waitKey(30) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
print(f"总车辆数: {vehicle_count}")
# 使用示例
traffic_counting('videos/traffic.mp4')