核心概念
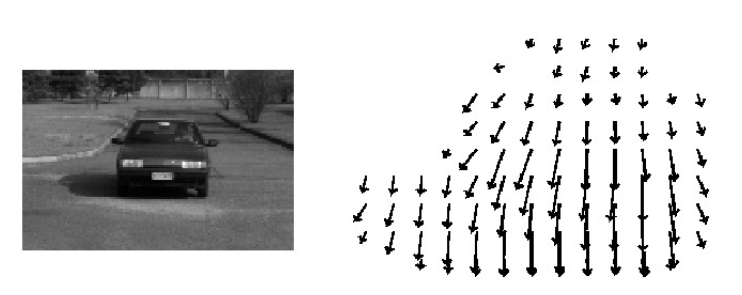
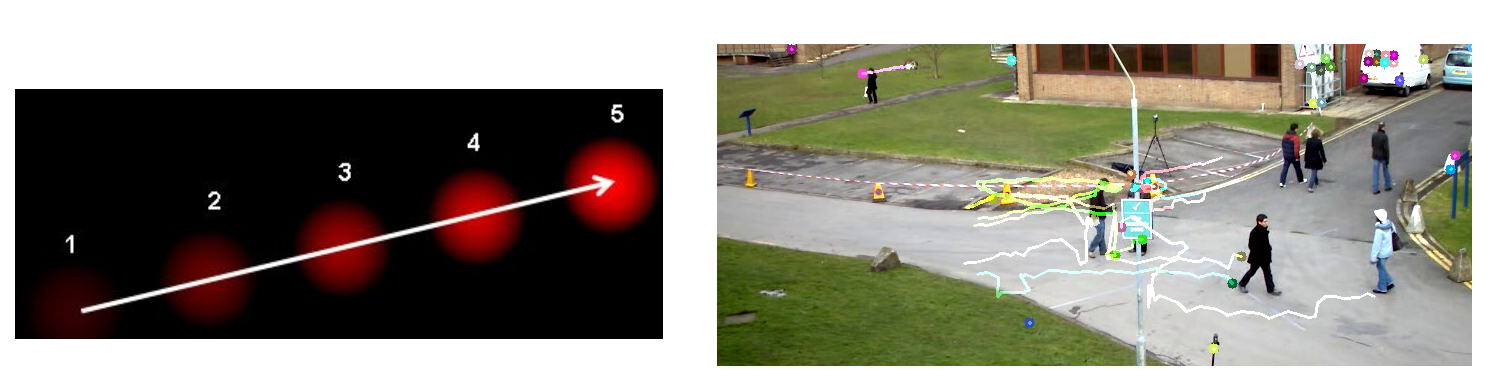
光流是描述图像中像素运动的瞬时速度矢量场,基于亮度恒定假设来估计物体运动。光流估计在计算机视觉中具有重要应用,包括目标跟踪、运动分析、视频压缩等。
流程图
graph LR
A[视频序列] --> B[特征点检测]
B --> C[Harris/Shi-Tomasi]
C --> D[Lucas-Kanade算法]
D --> E[构建方程组]
E --> F[最小二乘求解]
F --> G[光流矢量]
G --> H[目标跟踪]
H --> I[应用输出]
style A fill:#FF3D71,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style B fill:#00D4FF,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style C fill:#00C851,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style D fill:#FF9500,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style E fill:#9C27B0,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style F fill:#E91E63,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style G fill:#FF5722,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style H fill:#4CAF50,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
style I fill:#2196F3,stroke:#FFFFFF,stroke-width:3px,color:#FFFFFF
光流基本假设
亮度恒定假设:
小运动假设: 运动位移足够小,可以用一阶泰勒展开近似
空间一致性假设: 邻近像素具有相同的运动模式
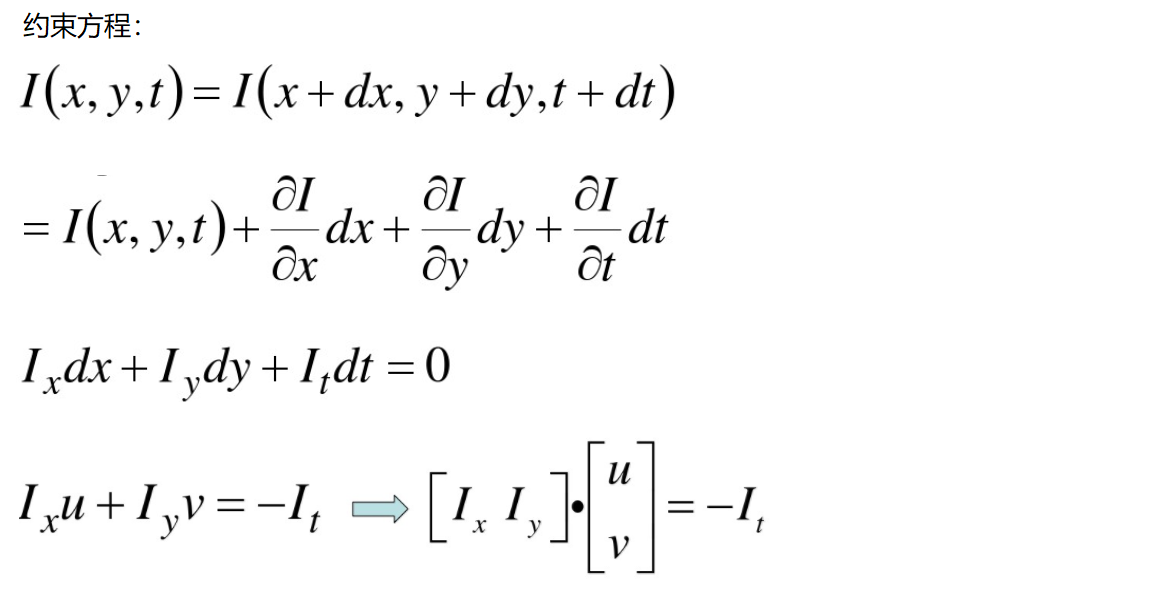
光流约束方程
通过泰勒展开和亮度恒定假设,得到光流约束方程:
由于
简化为:
其中:
为光流速度分量 为图像梯度
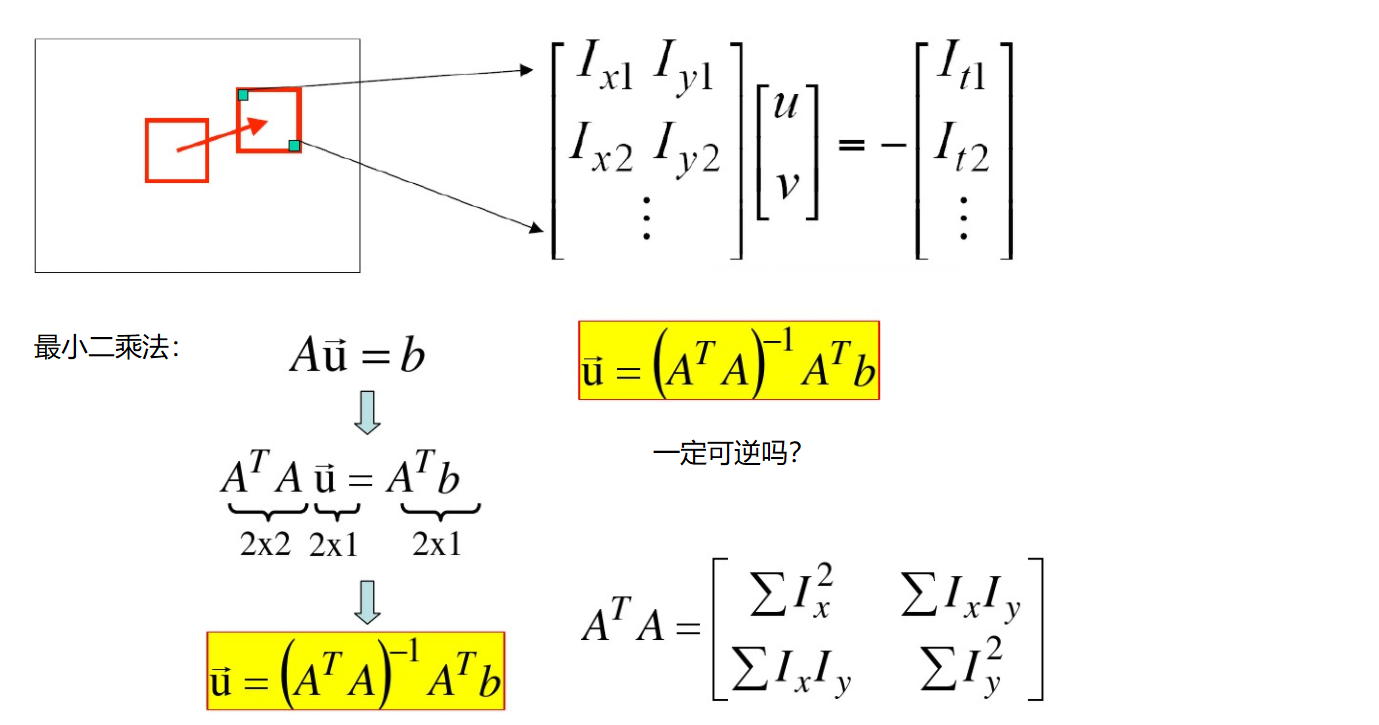
Lucas-Kanade 算法
数学推导
假设窗口内所有像素具有相同运动,构建方程组:
矩阵形式:
最小二乘解
通过最小化残差平方和:
展开为:
算法可靠性判断
通过特征值判断解的可靠性:
- 设
- 特征值:
- 判断条件:
且
OpenCV 实现
函数详解
cv2.calcOpticalFlowPyrLK(prevImg, nextImg, prevPts, nextPts, status=None, err=None, winSize=(21,21), maxLevel=3, criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 30, 0.01), flags=0, minEigThreshold=1e-4)
功能: 使用金字塔 Lucas-Kanade 算法计算稀疏光流
参数:
prevImg: 前一帧灰度图像 (numpy.ndarray)nextImg: 当前帧灰度图像 (numpy.ndarray)prevPts: 前一帧中的特征点坐标 (numpy.ndarray)
- 形状为 (N, 1, 2) 的浮点数组
nextPts: 当前帧中对应的特征点坐标 (numpy.ndarray, 可选)
- 如果为 None,将自动计算
status: 输出状态数组 (numpy.ndarray, 可选)err: 输出误差数组 (numpy.ndarray, 可选)winSize: 搜索窗口大小 (tuple)
- 默认 (21, 21)
- 较大值:更鲁棒,但计算量大
- 较小值:计算快,但可能不准确
maxLevel: 金字塔最大层数 (int)
- 0: 不使用金字塔
- 值越大,能处理更大的运动
criteria: 终止条件 (tuple)
- 通常为 (type, maxCount, epsilon)
flags: 计算标志 (int, 可选)minEigThreshold: 最小特征值阈值 (float)
- 用于判断特征点质量
返回值:
nextPts: 当前帧中的特征点坐标 (numpy.ndarray)status: 状态数组,1 表示找到对应点,0 表示丢失 (numpy.ndarray)err: 每个特征点的误差 (numpy.ndarray)
cv2.goodFeaturesToTrack(image, maxCorners, qualityLevel, minDistance, corners=None, mask=None, blockSize=3, useHarrisDetector=False, k=0.04)
功能: 检测图像中适合跟踪的角点特征
参数:
image: 输入灰度图像 (numpy.ndarray)maxCorners: 返回的最大角点数 (int)qualityLevel: 角点质量水平 (float)
- 取值范围:0-1
- 相对于最强角点的质量比例
minDistance: 角点之间的最小欧氏距离 (float)corners: 输出角点数组 (可选)mask: 感兴趣区域掩码 (可选)blockSize: 角点检测窗口大小 (int, 默认 3)useHarrisDetector: 是否使用 Harris 检测器 (bool, 默认 False)k: Harris 检测器参数 (float, 默认 0.04)返回值: 角点坐标数组 (numpy.ndarray),形状为(N, 1, 2)
cv2.calcOpticalFlowFarneback(prev, next, flow, pyr_scale, levels, winsize, iterations, poly_n, poly_sigma, flags)
功能: 使用 Farneback 算法计算稠密光流
参数:
prev: 前一帧灰度图像 (numpy.ndarray)next: 当前帧灰度图像 (numpy.ndarray)flow: 输出光流场 (numpy.ndarray, 可选)pyr_scale: 金字塔缩放比例 (float)
- 典型值:0.5
levels: 金字塔层数 (int)
- 典型值:3
winsize: 平均窗口大小 (int)
- 典型值:15
iterations: 每层的迭代次数 (int)
- 典型值:3
poly_n: 像素邻域大小 (int)
- 典型值:5 或 7
poly_sigma: 高斯标准差 (float)
- 典型值:1.2
flags: 操作标志 (int)返回值: 光流场 (numpy.ndarray),形状为 (H, W, 2)
基础实现
import cv2
import numpy as np
import matplotlib.pyplot as plt
def lucas_kanade_tracking(video_path):
"""Lucas-Kanade光流跟踪基础实现"""
# 读取视频
cap = cv2.VideoCapture(video_path)
if not cap.isOpened():
print(f"无法打开视频: {video_path}")
return None
# Lucas-Kanade光流参数
lk_params = dict(
winSize=(15, 15),
maxLevel=2,
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03)
)
# 特征点检测参数
feature_params = dict(
maxCorners=100,
qualityLevel=0.3,
minDistance=7,
blockSize=7
)
# 读取第一帧
ret, old_frame = cap.read()
if not ret:
print("无法读取视频帧")
return None
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)
# 检测初始特征点
p0 = cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params)
# 创建随机颜色用于轨迹绘制
colors = np.random.randint(0, 255, (100, 3))
# 创建轨迹图像
mask = np.zeros_like(old_frame)
while True:
ret, frame = cap.read()
if not ret:
break
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 计算光流
if p0 is not None and len(p0) > 0:
p1, st, err = cv2.calcOpticalFlowPyrLK(
old_gray, frame_gray, p0, None, **lk_params
)
# 选择好的点
if p1 is not None:
good_new = p1[st == 1]
good_old = p0[st == 1]
# 绘制轨迹
for i, (tr, to) in enumerate(zip(good_new, good_old)):
a, b = tr.ravel().astype(int)
c, d = to.ravel().astype(int)
mask = cv2.line(mask, (a, b), (c, d), colors[i].tolist(), 2)
frame = cv2.circle(frame, (a, b), 5, colors[i].tolist(), -1)
img = cv2.add(frame, mask)
cv2.imshow('Frame', img)
# 更新前一帧和点
old_gray = frame_gray.copy()
p0 = good_new.reshape(-1, 1, 2)
if cv2.waitKey(30) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
# 使用示例
lucas_kanade_tracking('videos/traffic.mp4')
稠密光流实现
def farneback_optical_flow(video_path):
"""Farneback稠密光流实现"""
cap = cv2.VideoCapture(video_path)
if not cap.isOpened():
print(f"无法打开视频: {video_path}")
return None
# 读取第一帧
ret, frame1 = cap.read()
if not ret:
print("无法读取视频帧")
return None
prvs = cv2.cvtColor(frame1, cv2.COLOR_BGR2GRAY)
# 创建HSV图像用于可视化
hsv = np.zeros_like(frame1)
hsv[..., 1] = 255
while True:
ret, frame2 = cap.read()
if not ret:
break
next_frame = cv2.cvtColor(frame2, cv2.COLOR_BGR2GRAY)
# 计算稠密光流
flow = cv2.calcOpticalFlowFarneback(
prvs, next_frame, None, 0.5, 3, 15, 3, 5, 1.2, 0
)
# 转换为极坐标表示
mag, ang = cv2.cartToPolar(flow[..., 0], flow[..., 1])
# 设置HSV图像的色调和亮度
hsv[..., 0] = ang * 180 / np.pi / 2
hsv[..., 2] = cv2.normalize(mag, None, 0, 255, cv2.NORM_MINMAX)
# 转换为BGR显示
bgr = cv2.cvtColor(hsv, cv2.COLOR_HSV2BGR)
cv2.imshow('Original', frame2)
cv2.imshow('Optical Flow', bgr)
prvs = next_frame
if cv2.waitKey(30) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
# 使用示例
farneback_optical_flow('videos/traffic.mp4')
实时光流检测
def real_time_optical_flow():
"""实时光流检测"""
# 打开摄像头
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("无法打开摄像头")
return None
# 参数设置
lk_params = dict(
winSize=(15, 15),
maxLevel=2,
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03)
)
feature_params = dict(
maxCorners=100,
qualityLevel=0.3,
minDistance=7,
blockSize=7
)
# 读取第一帧
ret, old_frame = cap.read()
if not ret:
print("无法读取摄像头帧")
return None
old_gray = cv2.cvtColor(old_frame, cv2.COLOR_BGR2GRAY)
p0 = cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params)
# 创建轨迹
mask = np.zeros_like(old_frame)
colors = np.random.randint(0, 255, (100, 3))
frame_count = 0
while True:
ret, frame = cap.read()
if not ret:
break
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 每30帧重新检测特征点
if frame_count % 30 == 0:
p0 = cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params)
mask = np.zeros_like(frame) # 清除轨迹
# 计算光流
if p0 is not None and len(p0) > 0:
p1, st, err = cv2.calcOpticalFlowPyrLK(
old_gray, frame_gray, p0, None, **lk_params
)
if p1 is not None:
# 选择好的点
good_new = p1[st == 1]
good_old = p0[st == 1]
# 绘制轨迹
for i, (tr, to) in enumerate(zip(good_new, good_old)):
a, b = tr.ravel().astype(int)
c, d = to.ravel().astype(int)
mask = cv2.line(mask, (a, b), (c, d), colors[i].tolist(), 2)
frame = cv2.circle(frame, (a, b), 5, colors[i].tolist(), -1)
img = cv2.add(frame, mask)
cv2.imshow('Real-time Optical Flow', img)
# 更新
old_gray = frame_gray.copy()
p0 = good_new.reshape(-1, 1, 2)
frame_count += 1
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
# 使用示例
real_time_optical_flow()
算法比较
Lucas-Kanade vs Farneback
| 特性 | Lucas-Kanade | Farneback |
|---|---|---|
| 类型 | 稀疏光流 | 稠密光流 |
| 计算量 | 低 | 高 |
| 精度 | 高(局部) | 中等(全局) |
| 应用场景 | 目标跟踪 | 运动分析 |
| 实时性 | 好 | 一般 |
优缺点分析
Lucas-Kanade 算法
优点:
- 计算效率高,适合实时应用
- 对特征点跟踪精度高
- 实现简单,参数较少
- 对局部运动分析效果好
缺点:
- 只能跟踪特征点,无法获得全局运动信息
- 对大运动敏感,需要金字塔处理
- 特征点可能丢失
- 依赖于良好的特征点检测
Farneback 算法
优点:
- 提供稠密光流场信息
- 能够分析全局运动模式
- 对纹理丰富区域效果好
- 不依赖特征点检测
缺点:
- 计算量大,实时性较差
- 对参数敏感,需要仔细调优
- 在纹理稀少区域效果不佳
- 内存消耗大
应用场景
适用场景
Lucas-Kanade 光流适用于:
- 实时目标跟踪
- 视频监控系统
- 手势识别
- 人脸跟踪
- 移动端应用
Farneback 光流适用于:
- 运动分析
- 视频稳定
- 背景建模
- 运动检测
- 科学研究
目标跟踪
def object_tracking_with_optical_flow(video_path):
"""基于光流的目标跟踪"""
cap = cv2.VideoCapture(video_path)
if not cap.isOpened():
return None
# 读取第一帧并选择目标
ret, frame = cap.read()
if not ret:
return None
# 手动选择跟踪区域(也可以用检测器自动选择)
bbox = cv2.selectROI("Select Object", frame, False)
cv2.destroyWindow("Select Object")
# 在选择区域内检测特征点
x, y, w, h = [int(i) for i in bbox]
roi = frame[y:y+h, x:x+w]
roi_gray = cv2.cvtColor(roi, cv2.COLOR_BGR2GRAY)
# 特征点检测
feature_params = dict(
maxCorners=100,
qualityLevel=0.3,
minDistance=7,
blockSize=7
)
p0 = cv2.goodFeaturesToTrack(roi_gray, mask=None, **feature_params)
if p0 is not None:
# 调整坐标到全图
p0[:, :, 0] += x
p0[:, :, 1] += y
# 光流参数
lk_params = dict(
winSize=(15, 15),
maxLevel=2,
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT, 10, 0.03)
)
old_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
while True:
ret, frame = cap.read()
if not ret:
break
frame_gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
if p0 is not None and len(p0) > 0:
# 计算光流
p1, st, err = cv2.calcOpticalFlowPyrLK(
old_gray, frame_gray, p0, None, **lk_params
)
if p1 is not None:
# 选择好的点
good_new = p1[st == 1]
if len(good_new) > 0:
# 计算目标位置
center_x = int(np.mean(good_new[:, 0]))
center_y = int(np.mean(good_new[:, 1]))
# 绘制跟踪结果
cv2.circle(frame, (center_x, center_y), 20, (0, 255, 0), 2)
cv2.rectangle(frame,
(center_x - w//2, center_y - h//2),
(center_x + w//2, center_y + h//2),
(0, 255, 0), 2)
# 绘制特征点
for pt in good_new:
x_pt, y_pt = pt.ravel().astype(int)
cv2.circle(frame, (x_pt, y_pt), 3, (255, 0, 0), -1)
p0 = good_new.reshape(-1, 1, 2)
cv2.imshow('Object Tracking', frame)
old_gray = frame_gray.copy()
if cv2.waitKey(30) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
# 使用示例
object_tracking_with_optical_flow('videos/object.mp4')
运动分析
def motion_analysis(video_path):
"""运动分析应用"""
cap = cv2.VideoCapture(video_path)
if not cap.isOpened():
return None
ret, frame1 = cap.read()
if not ret:
return None
prvs = cv2.cvtColor(frame1, cv2.COLOR_BGR2GRAY)
# 运动统计
motion_history = []
while True:
ret, frame2 = cap.read()
if not ret:
break
next_frame = cv2.cvtColor(frame2, cv2.COLOR_BGR2GRAY)
# 计算稠密光流
flow = cv2.calcOpticalFlowFarneback(
prvs, next_frame, None, 0.5, 3, 15, 3, 5, 1.2, 0
)
# 计算运动强度
mag, ang = cv2.cartToPolar(flow[..., 0], flow[..., 1])
# 运动统计
motion_intensity = np.mean(mag)
motion_history.append(motion_intensity)
# 可视化运动区域
motion_mask = mag > np.mean(mag) + 2 * np.std(mag)
frame2[motion_mask] = [0, 0, 255] # 标记高运动区域为红色
# 显示运动强度
cv2.putText(frame2, f'Motion: {motion_intensity:.2f}',
(10, 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
cv2.imshow('Motion Analysis', frame2)
prvs = next_frame
if cv2.waitKey(30) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
# 绘制运动趋势
plt.figure(figsize=(10, 6))
plt.plot(motion_history)
plt.title('Motion Intensity Over Time')
plt.xlabel('Frame Number')
plt.ylabel('Motion Intensity')
plt.grid(True)
plt.show()
# 使用示例
motion_analysis('videos/sports.mp4')